Multicopters are remarkable devices. Despite their common to helicopter's principles of operation, they make separate class of flying objects.
For configuration, diagnostics, analysis and firmware upgrades there is software: Cyberdrone Configurator.
Cyberdrone Configurator allows:
* preview of IMU measurements (graphs)
* 3d simulation
* preview of PID controllers state, motors and PPM signal from RC receiver (graphs)
* preview and playing of flight recording read from black box module
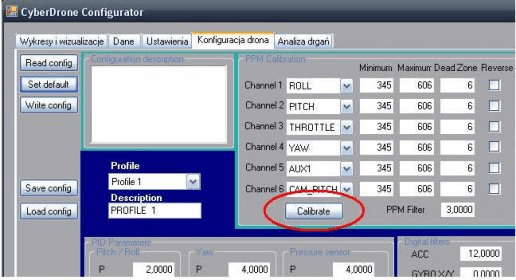
* radio controller calibration and setup
* detailed configuration of copter steering and stabilization algorithm's parameters
* firmware upgrade from web source with easy upload and apply procedure
Main functions:
* quadro, hexa, octo work mode. Possible number of motors fro4 to 12 in any configuration
* maintaining stable flight (pitch, roll and yaw axes)
* constant flight altitude (or climbing speed) during maneuvers
* possibility of transmitting flight's parameters and telemetry to ground station (using radiomodem)
* lighting - for better copter visibility and signalization of battery depletion
* compatible with any RC receiver working in PWM standard (minimum 4 channels)
* working with any I2C ESC's (addresses 0x50, 0x52, 0x54, 0x56, ...)
* two axis camera stabilization (pitch and roll)
o compatible with both 90 and 180 degrees servos (PWM standard)
* compatible with LiPol 3S, and 4-5S battery (using impulse stabilizer)
Comments